您當前所在的位置:首頁 > 碩博產品>港口機械仿真
PRODUCT
港口機械仿真
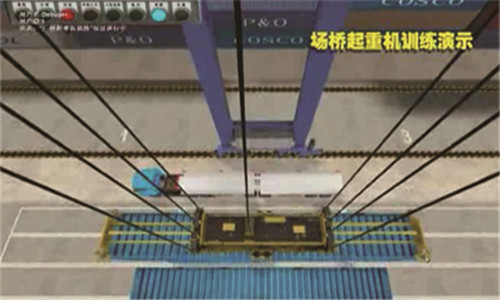
堆場集裝箱起重機模擬器



堆場集裝箱起重機仿真操作系統(tǒng)起重機仿真操作系統(tǒng)是一項高技術產品,結合了起重機動力學、起重機運動學、數(shù)字圖像處理、計算機圖形學、傳感與控制技術、信息技術、現(xiàn)代起重機操作技術、安全操作規(guī)范等多項學科的技術內容,代表了現(xiàn)代職業(yè)教育的發(fā)展方向,是一種綠色環(huán)保、無碳排放、低成本的現(xiàn)代化起重機操作訓練及考核的先進技術。
堆場集裝箱起重機仿真操作系統(tǒng)由駕駛室、教員臺控制系統(tǒng)、三維成像視景系統(tǒng)、動力學數(shù)學模型、PLC邏輯控制系統(tǒng)、音響系統(tǒng)、教學投影系統(tǒng),網(wǎng)絡通訊系統(tǒng)等模塊組成。
其中,教員臺控制系統(tǒng)為整個仿真系統(tǒng)的控制者,各個部分的運作可由它通過發(fā)送命令數(shù)據(jù)來控制,同時它也是數(shù)據(jù)傳輸?shù)闹修D站。教員臺系統(tǒng)接受來自PLC的數(shù)據(jù),包括來自操縱臺的數(shù)據(jù),并實時發(fā)送給視景系統(tǒng)以通過動力學模型來驅動視景。同時它接受視景系統(tǒng)的反饋信息,并實時反饋信息和直接控制PLC以達到控制操作臺及運動平臺的目的。視景系統(tǒng)、音響系統(tǒng)用來產生圖像和聲音,座椅振動控制系統(tǒng)模擬實際振動。駕駛室內有操作臺、投影屏等用于訓練操作。PLC直接與操縱臺,在控制的同時,接受它們的信息反饋。
起重機仿真操作系統(tǒng)總體功能
(1)系統(tǒng)能一機多用,已經具有堆場集裝箱起重機的訓練功能,并可再擴展其他機型的訓練功能。
(2)起重機駕駛操作環(huán)境取自于大型港口和大型工業(yè)企業(yè)典型車間,環(huán)境高度逼真,沉浸感非常好,座椅及手動操作臺與實際起重機司機駕駛室的一樣,與實際駕駛環(huán)境一致。
(3)港口起重機模擬教學設備要具有一體教學通迅接口。
(4)該系統(tǒng)可生成不同氣候條件的訓練工況;
(5)系統(tǒng)已經具備良好的兼容性和可擴充性,以后可以增加其他類型起重機的訓練軟件,而不需要增加或改變主要的硬件配置;
(6)系統(tǒng)具有起重機司機考試功能,考核程序和內容符合國家或行業(yè)標準,并可根據(jù)考核程序的變化而調整;
(7)系統(tǒng)的視景具有普通三維和立體兩種顯示功能,普通三維培訓司機基本操作技能,立體視景培訓司機的空間定位感覺,以供用戶選擇使用;
(8)系統(tǒng)設計思想新穎、設計目標明確,僅針對起重機司機的培訓和考核,系統(tǒng)硬件組成簡單、管理維護比較簡便、可靠性高、穩(wěn)定性好、使用方便。
1.1系統(tǒng)硬件技術組成及技術規(guī)格
系統(tǒng)硬件有:司機駕駛操作臺、軟件運行服務器、投影系統(tǒng)、教員監(jiān)控臺。
1.1司機操作臺就是根據(jù)實際起重機駕駛操作臺改造而成,大小尺寸與實際一致;操作臺上的儀表、開關、指示燈等可根據(jù)仿真訓練起重機的不同類型快速更換。
1.2軟件運行服務器配置:CPUi5,內存4G,顯卡1G,硬盤:320G。
1.3投影系統(tǒng)為環(huán)繞式。環(huán)繞圖象顯示面積為4×100英寸;投影幕布位于司機操作臺的正前方、正下方、左側和右側;其中,正下方的投影硬件支持立體圖象顯示。
投影儀:配置超短焦距鏡頭,分辨率為1280×1024,亮度為3000Lum,視景效果連續(xù),拼接完整,在操作座椅上觀察與現(xiàn)實中的視覺效果一致。
投影幕布為背投成像方式。
1.4系統(tǒng)組合形式為拆裝式;
1.5系統(tǒng)整體布置占地面積為20~25平方米,動態(tài)最大高度為3米。
1.6教員監(jiān)控臺主要用于實時監(jiān)控學員的學習狀況、設定訓練參數(shù),包括:訓練記錄、設定訓練內容及難度,控制整個系統(tǒng)運行的開關等。
系統(tǒng)軟件技術功能
起重機仿真操作系統(tǒng)軟件主要由仿真訓練軟件、考核軟件、教學管理軟件、環(huán)繞視景顯示控制軟件、操作臺及其監(jiān)控軟件等組成
 2.1仿真訓練軟件具備的技術性能
2.1.1已具備港口堆場集裝箱起重機的訓練功能:
堆場集裝箱橋式起重機訓練模塊中包含岸橋、集裝箱、集卡、船舶、泊位場景等元素。在此訓練模塊中,司機需要駕駛岸橋,進行多機構的協(xié)同操作以完成集裝箱的卸船和裝船作業(yè)。操作流程如前節(jié)所述。岸橋訓練模塊中又包含多個子模塊,如開關機訓練、裝船訓練、卸船訓練、大車行走、吊具控制、前伸臂俯仰等,還可以進行意外事件的處置訓練,訓練內容總體符合港口行業(yè)常規(guī)。
2.1.2可在一定范圍內設置或改變起重機的速度參數(shù)
堆場集裝箱起重機
起升速度:40-180m/min;起重小車行駛速度:30-350m/min;大車行走速度:10-50m/min;堆場集裝箱起重機前伸臂俯仰時間:小于6分鐘;
2.1.3天氣條件設置的無級化功能
晴天——多云——陰天——小雨——中雨——大雨,雷電,無級可調;
風力:無風——6級,無級可調,風向可變;
霧:無霧——小霧——大霧,無級可調;
白天——夜晚,無級可調。
2.1.4能模擬場橋的作業(yè)流程,設置各種機械、氣候參數(shù)。訓練模擬過程真實。場橋模型、吊具、集裝箱、集卡模型清晰真實;
2.1.5集裝箱起重機能進行20尺、40尺、雙20尺集裝箱的裝卸訓練;
2.1.6訓練強度和難度能根據(jù)在規(guī)定的時間內要求學員完成的裝卸貨物量、學員做關鍵操作動作時的難易程度等條件進行分級設定。
2.1.7 WM-VS/YC型起重機系統(tǒng)吊具的動態(tài)模型是根據(jù)理論和實際現(xiàn)場綜合研究的成果所建立,其動態(tài)特性與實際工況對應一致。
2.1.8系統(tǒng)還可根據(jù)用戶需求定制各種作業(yè)場景。
2.1.9 WM-VS/YC型起重機系統(tǒng)司機室的動態(tài)模型是根據(jù)理論和實際現(xiàn)場綜合研究的成果所建立,可擴展運動功能,使司機室動態(tài)特性與實際工況相符。
2.1仿真訓練軟件具備的技術性能
2.1.1已具備港口堆場集裝箱起重機的訓練功能:
堆場集裝箱橋式起重機訓練模塊中包含岸橋、集裝箱、集卡、船舶、泊位場景等元素。在此訓練模塊中,司機需要駕駛岸橋,進行多機構的協(xié)同操作以完成集裝箱的卸船和裝船作業(yè)。操作流程如前節(jié)所述。岸橋訓練模塊中又包含多個子模塊,如開關機訓練、裝船訓練、卸船訓練、大車行走、吊具控制、前伸臂俯仰等,還可以進行意外事件的處置訓練,訓練內容總體符合港口行業(yè)常規(guī)。
2.1.2可在一定范圍內設置或改變起重機的速度參數(shù)
堆場集裝箱起重機
起升速度:40-180m/min;起重小車行駛速度:30-350m/min;大車行走速度:10-50m/min;堆場集裝箱起重機前伸臂俯仰時間:小于6分鐘;
2.1.3天氣條件設置的無級化功能
晴天——多云——陰天——小雨——中雨——大雨,雷電,無級可調;
風力:無風——6級,無級可調,風向可變;
霧:無霧——小霧——大霧,無級可調;
白天——夜晚,無級可調。
2.1.4能模擬場橋的作業(yè)流程,設置各種機械、氣候參數(shù)。訓練模擬過程真實。場橋模型、吊具、集裝箱、集卡模型清晰真實;
2.1.5集裝箱起重機能進行20尺、40尺、雙20尺集裝箱的裝卸訓練;
2.1.6訓練強度和難度能根據(jù)在規(guī)定的時間內要求學員完成的裝卸貨物量、學員做關鍵操作動作時的難易程度等條件進行分級設定。
2.1.7 WM-VS/YC型起重機系統(tǒng)吊具的動態(tài)模型是根據(jù)理論和實際現(xiàn)場綜合研究的成果所建立,其動態(tài)特性與實際工況對應一致。
2.1.8系統(tǒng)還可根據(jù)用戶需求定制各種作業(yè)場景。
2.1.9 WM-VS/YC型起重機系統(tǒng)司機室的動態(tài)模型是根據(jù)理論和實際現(xiàn)場綜合研究的成果所建立,可擴展運動功能,使司機室動態(tài)特性與實際工況相符。
 2.2考核軟件具備的技術性能
2.2.1堆場集裝箱起重機的考核程序和內容符合港口行業(yè)標準的要求;
2.2.2系統(tǒng)能夠自動給學員判分。
2.3教學管理軟件具備的技術性能
2.3.1學員可以根據(jù)學號登記上機,每位學生都有單獨的訓練記錄條目;
2.3.2能記錄和查詢學員在訓練或考核中的失誤次數(shù)或不規(guī)范操作的次數(shù),包括吊具或貨物碰到其它物體的次數(shù)及強度,碰撞強度等級分為4-5級。
2.3.3能記錄和查詢學員在訓練或考核中的平均作業(yè)效率;
2.3.4能記錄和查詢學員的總體訓練時間和每次上機的課時訓練時間;
2.3.5能記錄和查詢學員操作的起重機吊具運行軌跡;
2.3.6能記錄和查詢學員在歷次考核中的分數(shù);
2.3.7能打印學員的成績報告單;
2.3.8能進行訓練條件或參數(shù)的設定。
2.2考核軟件具備的技術性能
2.2.1堆場集裝箱起重機的考核程序和內容符合港口行業(yè)標準的要求;
2.2.2系統(tǒng)能夠自動給學員判分。
2.3教學管理軟件具備的技術性能
2.3.1學員可以根據(jù)學號登記上機,每位學生都有單獨的訓練記錄條目;
2.3.2能記錄和查詢學員在訓練或考核中的失誤次數(shù)或不規(guī)范操作的次數(shù),包括吊具或貨物碰到其它物體的次數(shù)及強度,碰撞強度等級分為4-5級。
2.3.3能記錄和查詢學員在訓練或考核中的平均作業(yè)效率;
2.3.4能記錄和查詢學員的總體訓練時間和每次上機的課時訓練時間;
2.3.5能記錄和查詢學員操作的起重機吊具運行軌跡;
2.3.6能記錄和查詢學員在歷次考核中的分數(shù);
2.3.7能打印學員的成績報告單;
2.3.8能進行訓練條件或參數(shù)的設定。
 2.3.9集卡管、氣象管理、場景設置布局管理、機械參數(shù)設置管理、訓練難度設置、時間管理、故障管理、監(jiān)控吊具作業(yè)軌跡、統(tǒng)計作業(yè)效率、統(tǒng)計操作失誤等、控制臺軟件可同時管理32臺操作訓練終端。
2.3.10教師或管理人員可以遠程維護系統(tǒng),設置各類參數(shù)和考試科目,設置故障考核點,實時跟蹤訓練軌跡,記錄訓練全過程及結果考核,并能回放訓練過程,可發(fā)現(xiàn)需改進動作訓練及方法等。
2.4環(huán)繞視景顯示控制軟件具備的技術性能
2.4.1能選擇訓練環(huán)境的圖象顯示方式:3D立體模式或普通三維模式;
2.4.2投影光亮度不低于3000流明;
2.5操作臺及其監(jiān)控軟件具備的技術性能
2.3.9集卡管、氣象管理、場景設置布局管理、機械參數(shù)設置管理、訓練難度設置、時間管理、故障管理、監(jiān)控吊具作業(yè)軌跡、統(tǒng)計作業(yè)效率、統(tǒng)計操作失誤等、控制臺軟件可同時管理32臺操作訓練終端。
2.3.10教師或管理人員可以遠程維護系統(tǒng),設置各類參數(shù)和考試科目,設置故障考核點,實時跟蹤訓練軌跡,記錄訓練全過程及結果考核,并能回放訓練過程,可發(fā)現(xiàn)需改進動作訓練及方法等。
2.4環(huán)繞視景顯示控制軟件具備的技術性能
2.4.1能選擇訓練環(huán)境的圖象顯示方式:3D立體模式或普通三維模式;
2.4.2投影光亮度不低于3000流明;
2.5操作臺及其監(jiān)控軟件具備的技術性能
軟件能支持教師完成學員學習及考核的全程監(jiān)控,可進行訓練或考核內容、難度的設定。




 QQ客服
QQ客服
 返回頂部
返回頂部